Lunabotics Optical PIV
Using a statically seeded laser grid, optically sense movement in the xy plane. Done via brightest pixel tracking and phase cross correlation.

Conditions
Mission:
A rover travels to an area, mines regolith, and returns it to a deposition zone, in line with the NASA Robotic Mining Competition.
Playing Field:
The ground of the simulated lunar environment is fairly homogenous and monochromatic. This makes many SLAM methods difficult to accomplish as a camera pointed at the ground will not be able to discern optical features to track.
Design
Physical Set-Up:
Due to the homogeneous nature of the playing field, a traveling rover needs something to track. A laser array mounted on the deposition zone can cast a large grid onto the entire playing field, giving a rover something to track on an otherwise unremarkable surface. For the purposes of testing, a paranormal ghost hunting laser grid pen was used, as it offers a cheap way to project a laser grid. Videos were then taken to simulate rover movement, either by holding the camera static and moving the laser grid pen, or by holding the laser grid pen static and moving the camera.
Algorithm:
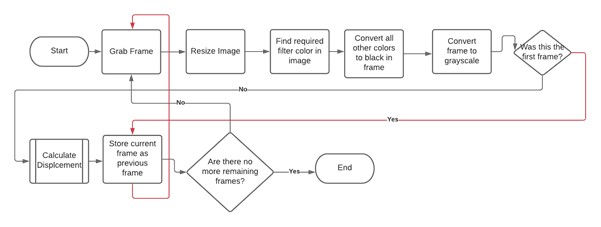
Two algorithms were developed to track the movement of the laser dots: the first uses Phase Cross Correlation, and the second tracks the brightest pixel between frames. Both use the same image pre-processing to attempt to minimize iteration speed. The goal of the algorithm is to input the videos that were taken to simulate rover movement and output time and displacement data. Other kinematic parameters can then be determined by taking the numerical derivative of displacement with respect to time.
Algorithm Flowcharts


Interactive Github Link
Click "Launch Binder" to view interactive code from your browser
Research Paper
Research Paper prepared for Vertically Integrated Projects